|

|
|
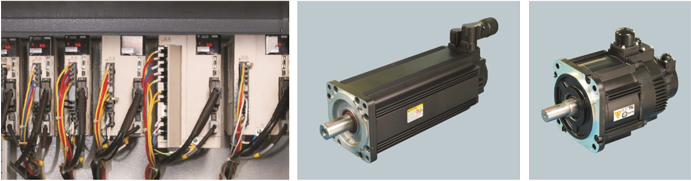
高性能伺服驱动与电机
|
|
|
|
|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|
高性能伺服驱动与电机
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 关注
关注